Decoding the 2030 Level 5 Autonomy Bet: A Technical Guide
Overview
In the world of autonomous driving, a friendly wager between two tech luminaries has sparked renewed debate about the feasibility of full self-driving cars. The bet, initiated by the author and John Carmack, stakes $10,000 (adjusted for inflation by 2030) on whether SAE Level 5 autonomous vehicles will be commercially available for passenger use in any of the top 10 most populous U.S. cities by January 1, 2030. Carmack bets for; the author bets against. This guide unpacks the bet's technical underpinnings, the definition of Level 5 autonomy, and the key challenges that will determine its outcome—equipping you with the knowledge to evaluate progress and even contribute to the solution.
Prerequisites
Before diving into the details, ensure you have a foundational understanding of:
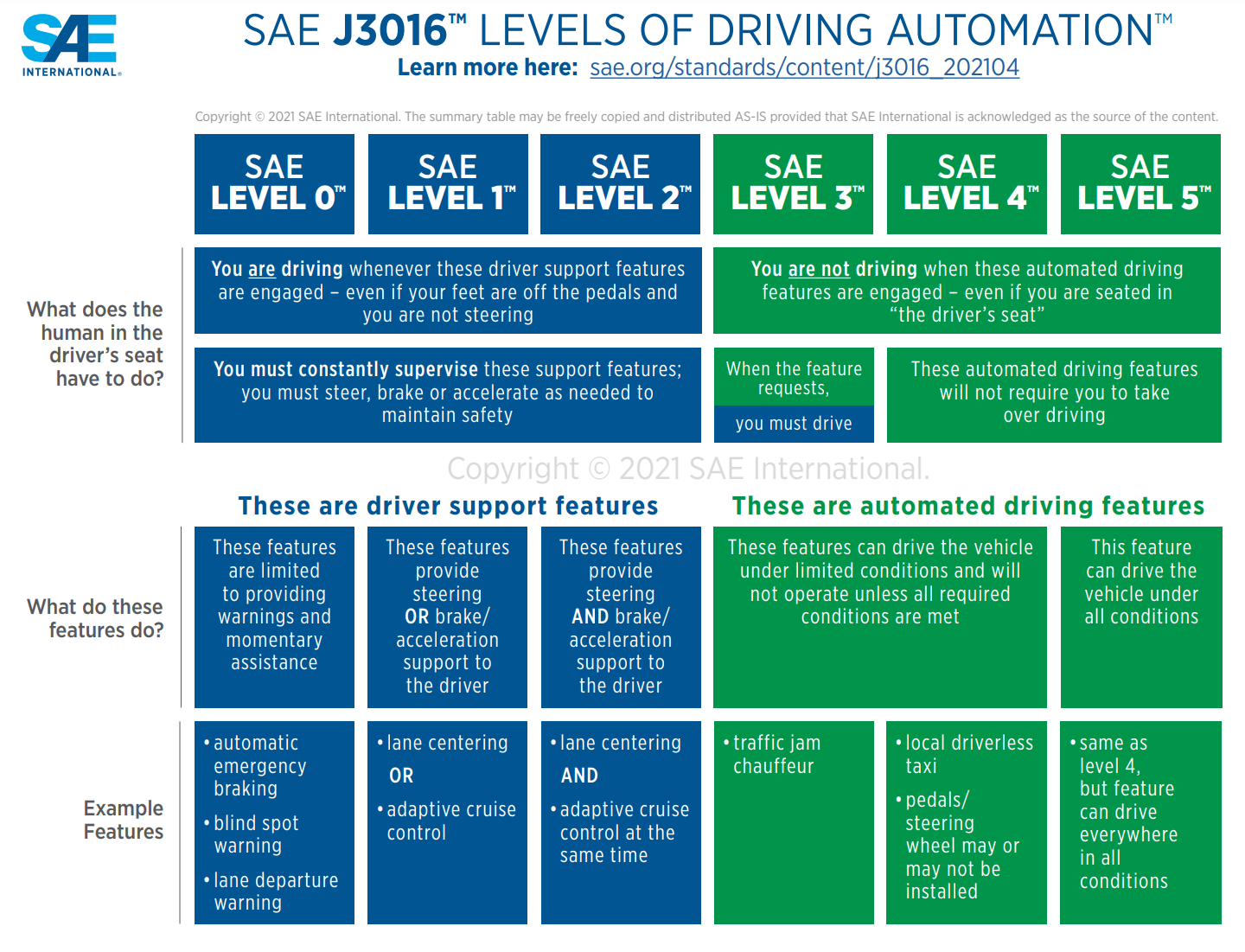
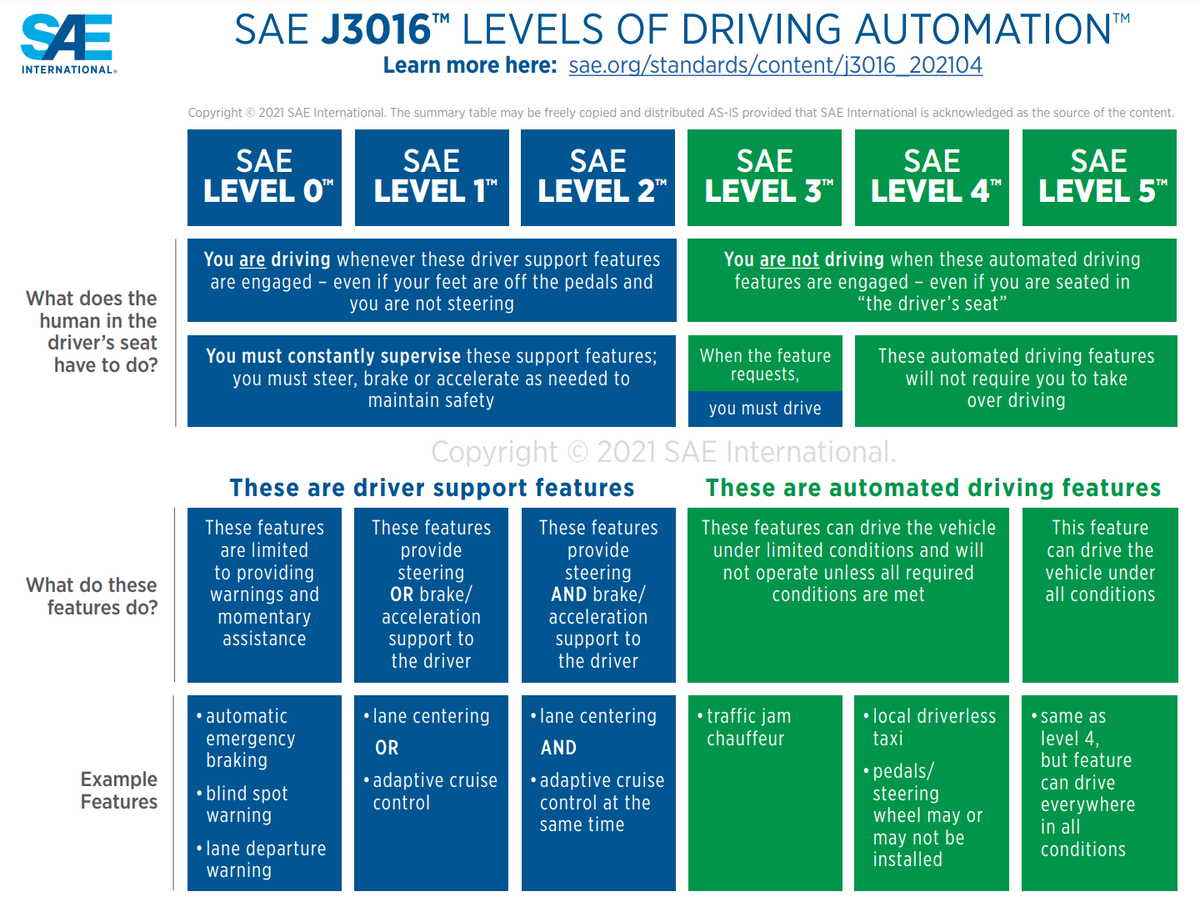
- The SAE J3016 standard for driving automation levels (0–5).
- Basic concepts in robotics, computer vision, and machine learning.
- Familiarity with current autonomous vehicle testing and deployment (e.g., Waymo, Cruise).
- An appreciation for real-world constraints like regulation, cost, and edge cases.
Step-by-Step Instructions
Step 1: Define Level 5 Autonomy
Per the SAE J3016 standard, a Level 5 vehicle performs all driving tasks under all conditions—with two explicit exceptions: natural disasters and emergencies. A human passenger simply enters the destination and the vehicle handles everything. No attention, interaction, or supervision is required. This is the gold standard that the bet revolves around.
Step 2: Understand the Bet's Scope
The bet has four key parameters:
- Date: Commercial availability by January 1, 2030.
- Geography: Any of the top 10 most populous U.S. cities (e.g., New York, Los Angeles, Chicago, etc.).
- Vehicle type: Passenger use only (not commercial freight or shuttles).
- Charity: $10,000 (adjusted for inflation) to the winner's chosen 501(c)(3) charity.
Step 3: Analyze the Technical Hurdles
Why does the author bet against? Because Level 5 is incredibly hard. Consider these challenges:
- Perception: Handle all weather (snow, fog, rain), lighting, and unusual road objects (e.g., construction debris, animals).
- Decision-making: Safe negotiation of unpredictable human drivers, pedestrians, and cyclists.
- Edge cases: Rare but critical scenarios like police hand signals, temporary traffic flows, or unmarked roads.
- Sensor reliability: Redundant systems that never fail, even in sensor-blind conditions.
- Regulation & liability: Legal frameworks that allow true driverless operation at scale.
Code-wise, think of a decision module that must handle an infinite number of states. A simplified example in pseudo-code:
def autonomous_drive(perception_data):
if is_emergency(perception_data):
safely_pull_over()
else:
plan_path(perception_data)
execute_controls()
monitor_human_reaction() # but Level 5 requires zero human involvement
# challenge: no human to react
Step 4: Contrast with Level 4
Today's most advanced systems (Waymo, Cruise) are Level 4: they operate autonomously only in specific conditions (e.g., sunny, mapped areas). Level 5 must generalize to any condition. Mistaking Level 4 demos for Level 5 readiness is a common error.
Step 5: Evaluate the Timeline
With eight years to go (as of 2022), ask: Can the industry overcome the remaining challenges? Proponents point to exponential improvements in AI and sensor cost reduction. Skeptics highlight that edge cases grow superlinearly with operational domain expansion. Track milestones like public deployment in dense urban cores, approval of truly driverless taxis, and insurance models for zero-occupant vehicles.
Common Mistakes
- Confusing Level 4 demonstrations with Level 5 readiness: Many videos show autonomous cars in ideal conditions—that's Level 4, not 5.
- Underestimating edge cases: The "last 1%" of driving situations accounts for a disproportionate amount of engineering effort.
- Ignoring regulatory and social acceptance: Even if technology works, public trust and legal frameworks may delay rollout beyond 2030.
- Assuming sensor fusion solves everything: Combining cameras, lidar, and radar still leaves gaps in adversarial weather or novel obstacles.
- Missing the inflation adjustment: The bet allows mutual adjustment so that $10,000 retains impact value—a detail easily overlooked.
Summary
This bet is more than a friendly wager—it's a public challenge to the research community to prove that Level 5 autonomy is achievable within a decade. By understanding the precise definitions, technical barriers, and common pitfalls, you can assess progress objectively. Whether you side with Carmack or the author, the bet encourages STEM engagement and pushes the field forward. Now, join the conversation—and maybe contribute to the open-source BASIC book project mentioned in the original post—because the road to true autonomy is still long.
Note: The original post also briefly discussed the author's pessimistic view on VR, contrasting it with AR and projection. That is outside this guide's scope but highlights the author's broader stance on emerging technologies.
Related Articles
- A Practical Guide to Open-Source Hardware Security: Exploring Azure Integrated HSM
- The Recipe Behind Chili’s Remarkable Resurgence: Q&A with CEO Kevin Hochman
- Navigating the Gray Zone: How to Spot Websites with Undefined Trust Levels
- Why AES-128 Remains Secure Against Quantum Threats: Debunking the Halving Myth
- How to Create Design Dialects for Your System
- Senate Advances Crypto Bill: Key Q&A on New Legislation
- How to Implement Design Dialects in Your Design System
- Study Reveals Financial Edge for Diverse Classmates in Professional Schools